- Catalogues
- MEDAN
- ELECTRIQUE A COURROIE
- Produits
- Catalogues
- News & Trends
- Salons
ELECTRIQUE A COURROIE
1 /13Pages

ELECTRIQUE A COURROIE
1 /13Pages
Extraits du catalogue

Exemples de montage 4 Caractéristiques techniques 5 Dimensions I 6 Dimensions II 7 Dimensions III 8 Accessoires I 11 Accessoires II 12 Données pour la sélection 13
Ouvrir le catalogue en page 2
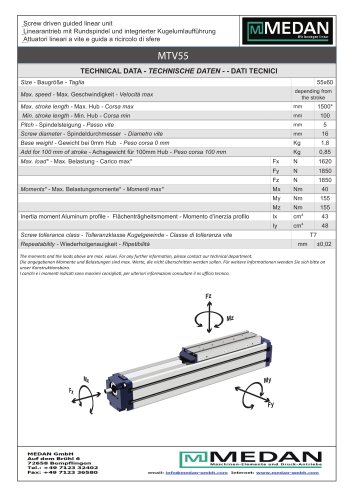
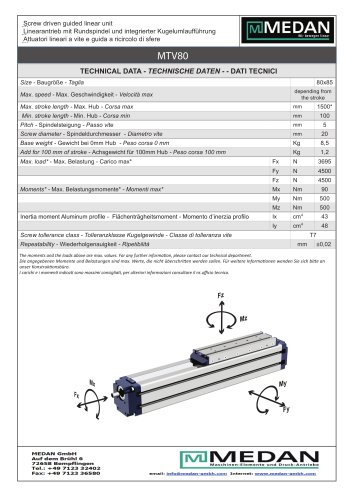
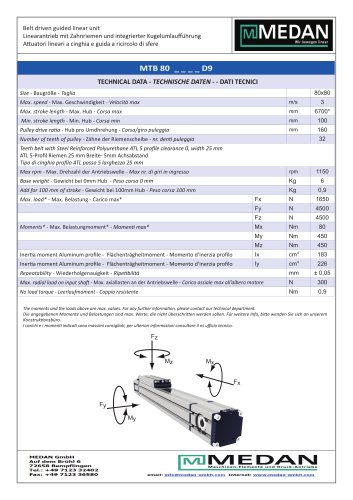
Le chariot, la courroie crantée, les paliers et le tube profilé, sont les pièces essentielles du vérin électrique MEDAN ELZ. Un moteur électrique (au choix du client) entraîne par l’intermédiaire d’une courroie crantée le chariot de translation sur lequel est fixé la charge à déplacer. L’étanchéité de la fente du profilé est réalisée par la bande de protection en Inox et évite ainsi l’intrusion de salissures. Les extrémités du profilé sont fixées par des paliers comportant des roulements et des poulies crantées. Le palier d’une des extrémités est prévu pour recevoir le moteur d’entraînement qui peut...
Ouvrir le catalogue en page 3
[ivDMEDAN _ Le mouvement linéaire
Ouvrir le catalogue en page 4
Construction et tailles: ELZ - Entraînement électrique linéaire à courroie Position de montage : Au choix (sans restriction) Profilé: Courroie: Guidages: Pignons: Bande de protection: Visserie: Fixations: Alu haute résistance anodisée Polyuréthane armé câbles acier POM Acier Acier Inoxydable Acier zingué, qualité 8.8 - 12.9 Acier zingué ou Alu anodisé Tailles Unités Course (déplacement ) mm Force maxi axiale N Couple à vide Nm Couple maxi Nm Poids de base kg Déplacement / tour mm / tr * Autres courses sur demande La vitesse maximale dépend de la distance de déplacement...
Ouvrir le catalogue en page 5
Les profilés comportent des rainures longitudinales, pour la fixation de différents accessoires, tels que capteurs magnétiques, plaques ou équerres, etc. Le profilé de la taille 63 possède des rainures qui permettent de recevoir des écrous de rainure BOSCH. Sous réserve de modifications techniques
Ouvrir le catalogue en page 6
Indications pour l’adaptation des brides ou lanternes selon motorisation. Tailles A B Palier d’entraînement à arbre pleins Indications pour l’adaptation des brides ou lanternes selon motorisation. pjOpuDJS ÔIJJOC Les profilés comportent des rainures longitudinales, pour la fixation de différents accessoires, tels que capteurs magnétiques, plaques ou équerres, etc. Le profilé de la taille 63 possède des rainures qui permettent de recevoir des écrous de rainure BOSCH. Sous réserve de modifications techniques
Ouvrir le catalogue en page 7
Exécution avec guidage additionnel Disponible en 3D sur www.medan.fr Vérins A 1. Les couples indiqués (M maxi) se réfèrent toujours au centre du rail de guidage. La force d'ancrage (L) doit être la somme de toutes les charges unitaires dont chacune se rapporte à sa position de référence. Cette position de référence peut se trouver à l'intérieur comme à l'extérieur de la surface du chariot. 2. En règle générale et dans les cas particuliers, les charges résultantes appliquées au chariot, sont à prendre en compte lors de la définition du module linéaire. Pour une sélection rapide du module il...
Ouvrir le catalogue en page 8
Performances et charges Données nécessaires pour la sélection de l’entraînement: - la charge à déplacer (Poids F) et sa position, qui définissent les différents couples. - Le temps de déplacement qui donne la vitesse et l’accélération. Les valeurs indiquées dans les tableaux ne doivent jamais être dépassées, même momentanément. Couples nécessaires en fonction du poids à déplacer Vérins ELZ Charge F maxi admissible Mx maxi Ms maxi Mv maxi Accélération maxi Vitesse d’entée maxi Vitesse de déplacement maxi Sous réserve de modifications techniques
Ouvrir le catalogue en page 9
Vitesse de déplacement: = déplacement par tour (voir tableau page 5) * vitesse de rotation = mm/tr * tr/mn / 1000 / 600 = m/s Charge statique maxi admissible: - Mx = F * h (position de montage horizontale) - Ms = F * rs (position de montage horizontale) Charges combinées: Si plusieurs couples agissent simultanément sur le vérin, il est nécessaire de vérifier la formule ci-après: M Ms Mv F Fonctions Charaes Fx et accélération: F = a * m Indication pour la commande Série Guidage Taille Course Arbre Sous réserve de modifications techniques
Ouvrir le catalogue en page 10
Accessoires I Pattes de fixation frontale Supports pour capteurs inductifs Accouplements - liaison vérin / motorisation Sous réserve de modifications techniques
Ouvrir le catalogue en page 11
Accessoires II Motorisation SERVO Moteurs PAS à PAS avec électronique intégrée Sous réserve de modifications techniques
Ouvrir le catalogue en page 12
1 - Charge de déplacement: L = N | | Horizontale Q Verticale 2 - Distances des charges par rapport à l’axe central: 2.0 - Distance verticale: a = mm 2.1 - Distance axiale latérale: b = mm 2.2 - Distance radiale gauche ou droite: c = mm 4 - Temps de déplacement: _secondes 5.1 - Ambiance poussiéreuse: I I Elevée Q Moyenne Q faible 5.2 - Vibrations / secousses: Q Elevées Q Moyennes Q faibles 6 - Indication pour la motorisation:
Ouvrir le catalogue en page 13Tous les catalogues et fiches techniques (PDF) MEDAN
 ELECTRIQUE A TIGE
ELECTRIQUE A TIGE24 Pages
 VÉRINS PNEUMATIQUES SANS TIGE
VÉRINS PNEUMATIQUES SANS TIGE62 Pages
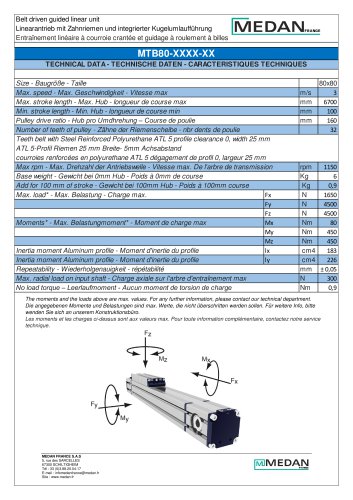 MTB 80
MTB 802 Pages
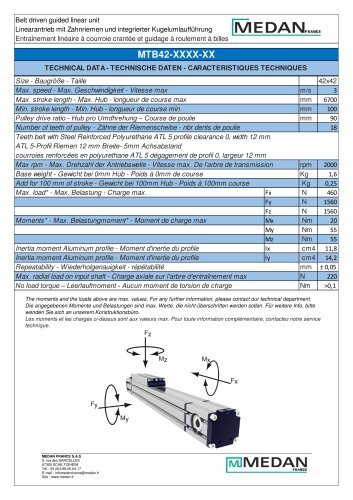 MTB 42
MTB 422 Pages
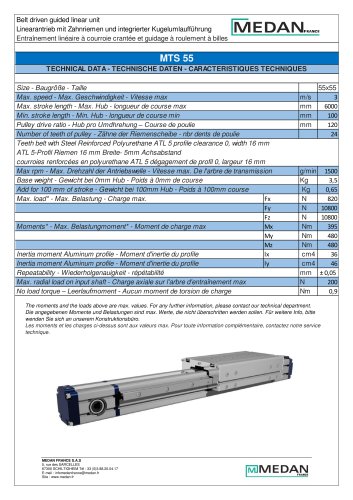 MTS 55
MTS 552 Pages
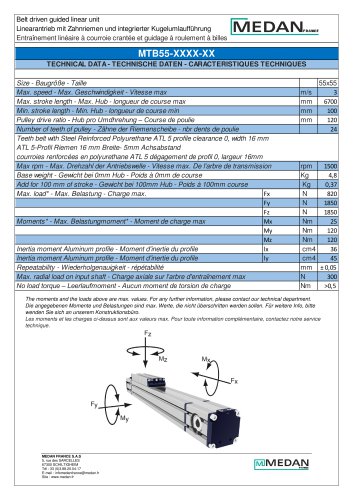 MTB 55
MTB 552 Pages
 MTS 80
MTS 802 Pages
 Vérins pneumatiques
Vérins pneumatiques44 Pages
 New – PLS diameter 32
New – PLS diameter 324 Pages
 GANTRY FOR MANIPULATOR
GANTRY FOR MANIPULATOR9 Pages
 AW-SERIE
AW-SERIE8 Pages
 PLS - SERIES THE GLIDE
PLS - SERIES THE GLIDE6 Pages
 PLR - SERIES
PLR - SERIES6 Pages
 PLF-SERIES
PLF-SERIES11 Pages
 PL-SERIES
PL-SERIES11 Pages
 MCQI2 series
MCQI2 series11 Pages
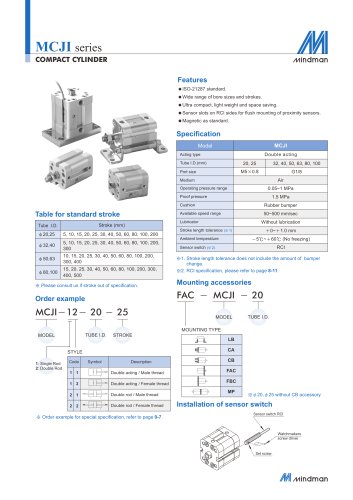 MCJI series
MCJI series7 Pages
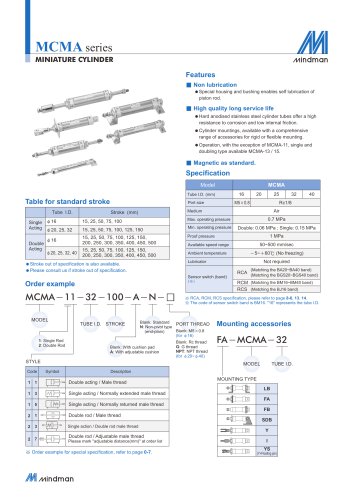 MCMA series
MCMA series13 Pages
 DUO 96 SERIES
DUO 96 SERIES8 Pages
 PLG - SERIES
PLG - SERIES4 Pages
 PLK - SERIES
PLK - SERIES6 Pages
 Accessories
Accessories2 Pages
 Duo96 Series
Duo96 Series8 Pages
 Medan Catalogue 2012
Medan Catalogue 201270 Pages





Catalogues archivés
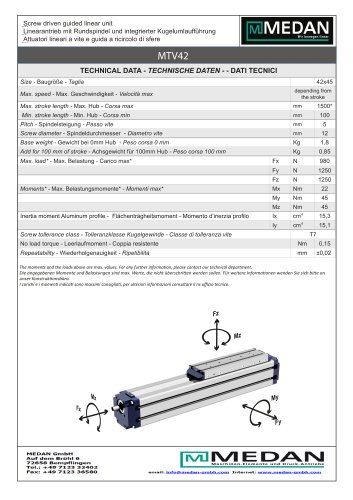 Linear actuator Serie MTV42
Linear actuator Serie MTV422 Pages
 Linear actuator Serie MTV55
Linear actuator Serie MTV552 Pages
 Linear actuator Serie MTV80
Linear actuator Serie MTV802 Pages
- Vérin industrielle
- Actionneur industrielle
- Actionneur linéaire
- Actionneur électrique
- Vérin double effet
- Vérin pneumatique
- Vérin simple effet
- Vérin en alliage d'aluminium
- Actionneur de précision
- Vérin électrique
- Actionneur pneumatique
- Actionneur double effet
- Vérin à tige
- Vérin à vis
- Actionneur à courroie
- Actionneur guidé
- Vérin à vis à billes
- Vérin rotatif
- Vérin guidé
- Actionneur sans tige