- Catalogues
- Omron Electronics GmbH
- Adept Quattro s650HS
- Société
- Produits
- Catalogues
- News & Trends
- Salons
Adept Quattro s650HS
1 /2Pages
Adept Quattro s650HS
1 /2Pages
Extraits du catalogue

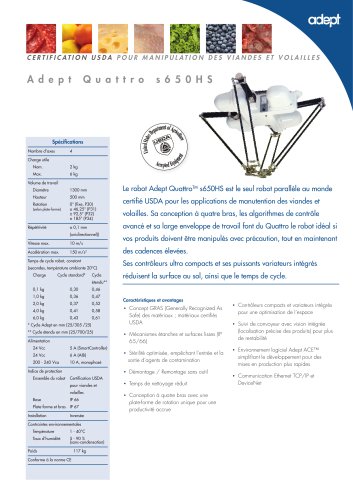
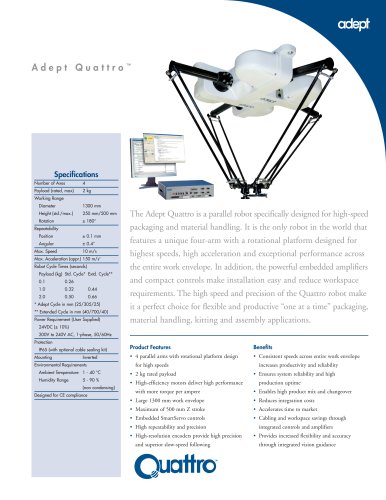
table.main {} tr.row {} td.cell {} div.block {} div.paragraph {} .font0 { font:8.00pt "Arial", sans-serif; } .font1 { font:11.00pt "Arial", sans-serif; } .font2 { font:12.00pt "Arial", sans-serif; } .font3 { font:13.00pt "Arial", sans-serif; } .font4 { font:14.00pt "Arial", sans-serif; } .font5 { font:18.00pt "Arial", sans-serif; } .font6 { font:26.05pt "Arial", sans-serif; } .font7 { font:32.00pt "Arial", sans-serif; } 1■ i 1^ adBpt CERTIFICATION USDA POUR MANIPULATION DE5 VIANDES ET VOLAILLES Adept Quattro s 6 5 0 H S Spթcifications htanbnt d'au» 4 Charge utile Nom* 21g Max. Volume d» travail Diamcfr* 1300 mm Hauteur 500 mm Relation 0*[W,P30) MonpbleJoflne} ±46,25* [P31) ±92.5" (P32) ±185' [P34| Rp詯M ±0,1 mm (unidirectionnel)) 10 mA Aooflii oriun max. 150 01/*' Temps de cycle robots constant (morde», tcrrpcratjrc ambiiyitc 20XJ Oxirge Cycle itanoard* CyoW renoVi" 0,1 kg 0.30 QA6 0,36 0/47 0,37 042 0,41 Q詣8 6,0 kg 0.43 0,61 * Cyde Adept en mm 125/305/251 "* Cycle «tondu en mm 125/700/25) AlirT*rrt*ion 24Vcc 5 A(SfnorlConlraJler) 24 Vcc A(AIB) ?CO 240 Vco 10A,rnonopKa«* Indice de protection EmemUeotjrvb* Certikohon USDA pour viande» of voiaill» Boa* IP 66 Fiole forme et brat IP 67 ImtoHo^on Inven4e Conroin ta environnemental»! 1 -40°C Toux d'humidit 590% . . . |«jn*-©onder-sat-o". raid* 117kg Conforme 䩠 la norme1 CE Le robot Adept Quattro s650HS est le seul robot parall٨le au monde certifi USDA pour les applications de manutention des viandes et volailles* Sa conception quatre bras, les algorithmes de contr頴le avanc et sa large enveloppe de travail font du Quattro le robot idal si vos produits doivent 驪tre manipuls avec prcaution, tout en maintenant des cadences 驩leves. Ses contrleurs ultra compacts et ses puissants variateurs int鴩grs rduisent la surrace au sol, ainsi que le temps de cycle. Corot ton stiquas et avantages 驕 Concept GRAS (Generally Rocognizod As Safe) des malriaux ; matriaux certifiꩩs USDA * Mcanismes tanches et surfaces lisses (P 65/661 Contr驴leurs compacts et variateurs in pour une optimisation de l'espace Suivi de convoyeur avec vision inlgre (localisation prꩩcise des produits) pour fJw de rentabilit Environnement bgiciel Adepl ACE simplifiant le d险veloppement pour des mises en production plus rapides Communication Ethernet TCP/IP et DcviccNet Strilit optimis驩e, ompchanf l'entre c sortie d'agonis de contamination D䩪mcntoge / Remontage sans oulil femps de nettoyage rduit Conception 6 quatre bfos avec une plate forme de rotohon unique pour une «oducm/lt ocaue b
Ouvrir le catalogue en page 1
table.main {} tr.row {} td.cell {} div.block {} div.paragraph {} .font0 { font:8.00pt "Arial", sans-serif; } .font1 { font:11.00pt "Arial", sans-serif; } .font2 { font:11.40pt "Arial", sans-serif; } .font3 { font:13.00pt "Arial", sans-serif; } .font4 { font:14.00pt "Arial", sans-serif; } .font5 { font:26.00pt "Arial", sans-serif; } .font6 { font:26.05pt "Arial", sans-serif; } adept quattro s 6 5 0 h s Dimension [mm Rayon 650 mm 211,8 700-732 («tan b plote forme) 215 Rayon 650 mm 285 Rayon 350 mm L'ensemble Adept Quattro S650HS est compos des l驩ments suivants : ͕ Robot Adopl Quattro...
Ouvrir le catalogue en page 2Tous les catalogues et fiches techniques (PDF) Omron Electronics GmbH
 TM Collaborative Robot Brochure
TM Collaborative Robot Brochure12 Pages
 Collaborative Robots Datasheet
Collaborative Robots Datasheet16 Pages
 New value for control panels
New value for control panels9 Pages
 NX1
NX138 Pages
 NYP
NYP14 Pages
 NYB
NYB13 Pages
 Industrial Automation Portfolio 2016
Industrial Automation Portfolio 2016172 Pages
 Panel Builder Guide 2017
Panel Builder Guide 2017276 Pages
 Industrial Automation Guide 2017
Industrial Automation Guide 2017894 Pages



Catalogues archivés
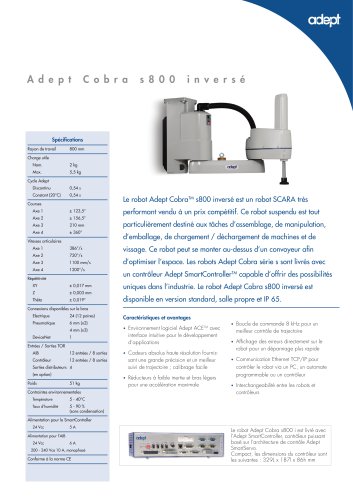 Adept Cobra s800 Inverted
Adept Cobra s800 Inverted2 Pages
 Adept Cobra s800
Adept Cobra s8002 Pages
 Adept Cobra i800
Adept Cobra i8002 Pages
 Adept Cobra s600
Adept Cobra s6002 Pages
 Adept Cobra i600
Adept Cobra i6002 Pages
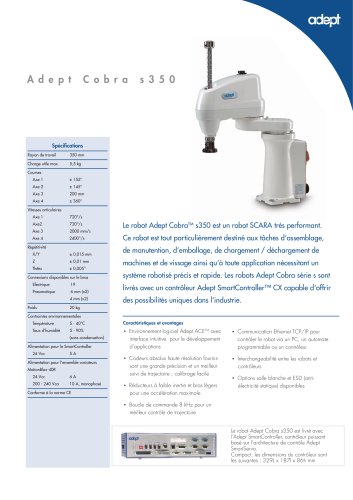 Adept Cobra s350
Adept Cobra s3502 Pages
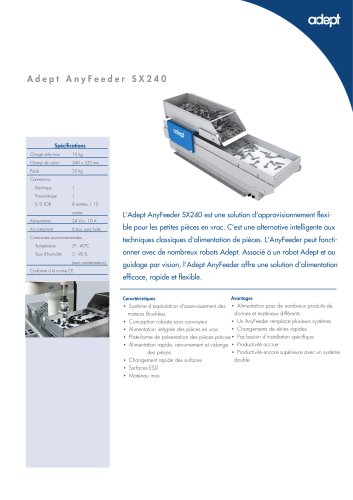 Adept AnyFeeder SX240
Adept AnyFeeder SX2402 Pages
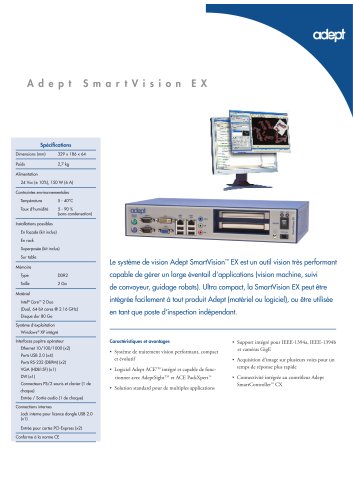 Adept SmartVision EX
Adept SmartVision EX2 Pages
 Adept Quattro s800H
Adept Quattro s800H2 Pages
 Famille de Adept Cobra (SCARA)
Famille de Adept Cobra (SCARA)14 Pages
 Adept Quattro s650H
Adept Quattro s650H2 Pages
 AdeptSight
AdeptSight2 Pages
 Adept DeskTop
Adept DeskTop2 Pages
 Adept SmartController CX
Adept SmartController CX2 Pages
 Pupitre manuel T2 Pendant
Pupitre manuel T2 Pendant2 Pages
 Gamme Adept
Gamme Adept2 Pages
 Collaborative Robots TM5
Collaborative Robots TM514 Pages
 Industrial Automation Selection 2016
Industrial Automation Selection 2016420 Pages
 Adept eCobra 600 SCARA robot
Adept eCobra 600 SCARA robot2 Pages
 Adept Product Portfolio
Adept Product Portfolio6 Pages
 Adept Robotics for Packaging
Adept Robotics for Packaging8 Pages
 Adept Mobile
Adept Mobile8 Pages
 Adept Mobile Robots
Adept Mobile Robots6 Pages


- Panel PC
- Panel PC industriel
- Système de caméra numérique
- Panel PC LCD
- Codeur industrielle
- Imageur visible
- Robot industriel
- Codeur rotatif
- Panel PC fanless
- Système de caméra industriel
- PC pour l'industrie
- Logiciel d'automatisation
- Solution logicielle de gestion
- PC Intel® Core™
- PC sans ventilateur
- Panel PC Intel® Core™
- Imageur de surveillance
- E/S numérique
- PC embarqué
- Panel PC Windows