- Catalogues
- PILZ
- Poster Collaboration homme/robot
Poster Collaboration homme/robot
1 /1Page

Poster Collaboration homme/robot
1 /1Page
Extraits du catalogue

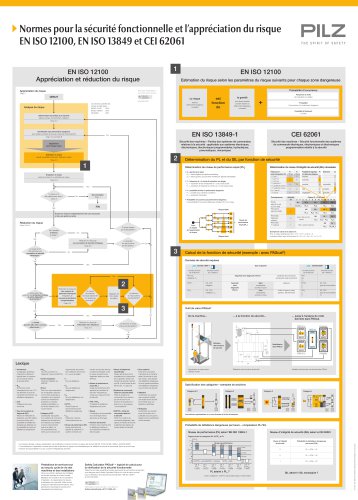
CHR - Collaboration homme / robot ISO/TS 15066 Nous automatisons. Et nous créons. Collaboration Homme Robot de sécurité. Cycle de vie Détermination du type de collaboration Prestations de services tout au long des phases de vie d’un système robotisé Pilz vous assiste dans la mise en œuvre des normes et directives en vigueur, du développement d’une stratégie de sécurité pour vos applications robotisées jusqu’à l’évaluation de la conformité. La CHR complète notre offre de formations. Coexistence L’homme travaille à son poste de travail à proximité de celui d’un robot. • Il n’y a pas de chevauchement entre les deux zones de travail et pas de contact physique dans le cadre d’une utilisation conforme aux prescriptions. Collaboration Collaboration séquentielle parallèle L’homme et le robot travaillent sur la même pièce, l’un après l’autre : lorsque l’homme travaille, le robot est à l’arrêt. Lorsque le robot travaille, l’ouvrier ne se trouve pas dans l’espace de travail partagé. • Il n’y a pas de contact physique entre l’homme et le robot dans le cadre d’une utilisation conforme aux prescriptions. L’homme et le robot travaillent simultanément au sein du même espace de travail. • Un contact physique entre l’homme et le robot est possible. Réduction du risque dans la collaboration homme / robot (CHR) Coexistence Collaboration Collaboration séquentielle parallèle Collaboration Il s’agit de la forme de collaboration la plus étroite : l’homme et le robot travaillent ensemble, main dans la main. • Un contact physique est nécessaire. Collaboration Solutions d’amélioration Nous élaborons des solutions techniques détaillées pour garantir la sécurité de vos applications avec robots par le biais de mesures mécaniques, électroniques et organisationnelles. Intégration des systèmes Les résultats obtenus grâce à l’appréciation du risque et aux solutions d’amélioration se traduisent par la mise en œuvre de mesures de sécurité adaptées. Évaluation internationale de la conformité Nous vous garantissons la conformité aux exigences réglementaires telles que le marquage CE en Europe ou encore OSHA aux États-Unis, NR12 au Brésil, KOSHA en Corée, GOST en Russie ou CCC en Chine. Conception de sécurité Grâce à une élaboration détaillée des mesures de protection nécessaires, on obtient la réduction ou la suppression des zones dangereuses de l’application. Validation Nous contrôlons et analysons l’appréciation du risque et les solutions d’amélioration grâce à un personnel spécialisé compétent et nous effectuons la mesure de collision conformément aux valeurs seuils de la spécification ISO/TS 15066. Formations et assistance technique Nous vous transmettons dans le cadre de nos formations un savoir-faire professionnel concernant l’utilisation en toute sécurité des robots. Notre assistance technique est à votre service 24 heures sur 24. (0 Arrêt auto-contrôlé de sécurité (2 Guidage manuel 3 Surveillance de la vitesse et de la distance L’association de plusieurs méthodes différentes est possible, par exemple l’association des méthodes 3 et 4 Explications relatives aux possibilités de réduction du risque Applicable aux systèmes électriques, électroniques, électroniques programmables, hydrauliques, Méthodes de la collaboration homme / robot conformément à l’EN iso 10218-2 et à i’iso/ts 15066 pneumatiques, mécaniques Détermination du PL par fonction de sécuritéDétermination du niveau de performance requis (PLr) Probabilité de défaillance dangereuse par heure -comparaison PL / SIL S - gravité de la lésion S1 = lésions légères (en général réversibles) S2 = lésions graves, pouvant être mortelles (en général irréversibles) F - fréquence et / ou durée d’exposition au danger F1 = exposition rare à fréquente et / ou de courte durée F2 = exposition fréquente à continue et / ou de longue durée Niveau de performance (PL) selon l’EN ISO 13849-1 ■°B ■ o" P - possibilité d’éviter le phénomène dangereux P1 = possible sous certaines conditions P2 = quasiment impossible Probabilité d’occurrence du phénomène dangereux Une probabilité d’occurrence faible peut réduire le PLr d’un niveau Méthode 1 -arrêt auto-contrôlé de sécurité Si on pénètre dans l’espace de collaboration, le robot se trouve à l’état de maintien de l’arrêt de sécurité. Lorsque l’on quitte l’espace, le robot reprend son mouvement par un acquittement ou automatiquement. La vitesse est définie à l’aide de l’appréciation du risque. Méthode 2 - guidage à la main L’homme est uniquement autorisé à s’approcher du robot lorsque celui-ci est à l’arrêt. En cas d’actionnement du dispositif de validation, le robot peut être guidé manuellement avec une vitesse réduite de sécurité. La vitesse est définie à l’aide de l’appréciation du risque. Méthode 3 - surveillance de la vitesse et de la distance Les dispositifs de sécurité sont utilisés de manière à ce que les personnes puissent s’approcher du robot à tout moment sans danger. La distance entre une personne et le robot est surveillée et la vitesse adaptée en conséquence. Avant qu’une collision se produise, le robot doit se trouver à l’état de maintien de sécurité. Méthode 4 - limitation de la puissance et de la force Une collision entre l’homme et le robot est possible à condition de respecter les valeurs seuils biomécaniques. Risque faible Point de départ de l’appréciation du risque PL atteint > PLr ? * dans la catégorie 4, la MTTFD est possible jusqu’à 2 500 années Conformément à l’EN ISO 10218-1/-2 PLd cat. 3 Méthode 4Valeurs seuils biomécaniques selon l’ISO / TS 15066 Spécification des catégories Catégorie B,1 Catégorie 3 Les solutions représentées ici ne sont fournies qu’à titre d’exemples. Lexique • B10d Nombre de cycles nécessaires pour que 10 % des éléments d’usure de l’échantillon rencontrent une défaillance dangereuse • CCF Défaillance de cause commune Erreur État d’une unité caractérisé par l’incapacité à exécuter une fonction demandée, à l’exception de l’incapacité durant une maintenance préventive ou d’autres opérations planifiées, ou du fait de l’absence d’un moyen externe • Taux de couverture du diagnostic (DC) Mesure de l’efficacité de diagnostic, peut être définie comme la fraction de la probabilité de défaillances dangereuses détectées sur la probabilité de toutes les défaillances dangereuses • DC avg Couverture de diagnostic moyenne du SRP/CS • Durée d’utilisation Durée de l’utilisation du SRP/CS Catégorie (CAT) Classification des parties d’un système de commande relatives à la sécurité liée à leur résistance aux défauts et à leur comportement suite à un défaut. Un tel comportement est obtenu par la structure de l’agencement des parties, par la détection des erreurs et / ou par sa fiabilité Zone de collaboration Espace de travail au sein de la zone sécurisée dans lequel le robot et l’homme peuvent exécuter simultanément des tâches pendant le fonctionnement en production mttfd Durée moyenne de fonctionnement avant défaillance dangereuse Niveau de performance (PL) Niveau permettant de spécifier la capacité d’un système à remplir une fonction de sécurité dans les conditions prévisibles. C’est le niveau de performance réellement atteint par notre SRP/CS Niveau de performance requis (PLr) Niveau de performance (PL) appliqué pour atteindre la réduction nécessaire du risque pour chaque fonction de sécurité PFHd Probabilité de défaillance dangereuse par heure Contact quasi-statique (écrasement) Contact entre l’utilisateur et le robot au cours duquel une partie du corps de l’utilisateur est écrasée entre un élément gênant fixe et le robot RCMP Robot Collision Measurement Position désigne le point de mesure de collision Risque Combinaison de la probabilité d’un dommage et de la gravité de ce dommage Shore A La dureté Shore est une valeur de base utilisée pour les élastomères et les plastiques. Elle indique la dureté du matériau. L’échelle Shore va de 0 à 100 Shore. Une valeur élevée correspond à une dureté importante • Fonction de sécurité Fonction d’une machine dont la défaillance entraîne un accroissement immédiat du (des) risque(s) • SRCF - Fonction de commande relative à la sécurité Fonction de commande exécutée par un SRECS avec un niveau d’intégrité déterminé, prévue pour maintenir la condition de sécurité de la machine ou empêcher un accroissement immédiat du risque •SRECS Systèmes de commande électrique relatifs à la sécurité • SRP/CS - Partie de commande relative à la sécurité Partie d’un système de commande réagissant à des signaux d’entrée de sécurité et générant des signaux de sortie relatifs à la sécurité Contact transitoire (choc) Contact entre l’utilisateur et le robot au cours duquel l’utilisateur n’est pas coincé et peut se dégager Validation Confirmation par examen que le système satisfait aux exigences de sécurité fonctionnelle pour une application spécifique Vérification Confirmation par examen et par la fourniture d’un justificatif prouvant que les exigences de la spécification ont été remplies D = dominant ND = non dominant Validation Zone du corps 1 2 3 6 8 9 16 10 11 21 23 18 26 27 28 Matériaux amortis- Constante de ressort seurs pour la mesure conformément à la de la pression confor- norme ISO/TS 15066 mément à la norme (N/mm) DGUV FBHM 080 (Shore A) Crâne et front Mesure des forces et pressions selon l’ISO / TS 15066 Les mesures décrites ci-dessus représentent une simplification et servent à fournir un aperçu des normes EN ISO 12100, EN ISO 13849-1 et EN ISO 10218-2. La connaissance et l’application correcte des normes et directives en vigueur sont nécessaires pour la validation de circuits de commande. Nous ne pouvons pas endosser de responsabilité en ce qui concerne l’intégralité des données. Valeur transitoire maximale effective FS 1p_s _______ Valeur quasi-statique maximale effective Limite transitoire pour la zone du corps concernée Plage de force ou de pression non acceptable Limite quasi-statique pour la zone du corps concernée Exemple de courbe de pression ou de force Plage de force ou de pression acceptable -► Durée Exigences de sécurité en matière de systèmes robotisés et d’intégration selon la norme EN ISO 10218-2 Le tableau G répertorie les exigences de performance spécifiques qui doivent être considérées comme essentielles et vérifiées et / ou validées. Site internet Robotique Prestations de services Renseignez-vous sur le thème Nous sommes à vos côtés : Prestations de de la robotique chez Pilz services de Pilz tout au long du cycle de vie
Ouvrir le catalogue en page 1Tous les catalogues et fiches techniques (PDF) PILZ
 Nouveautés 2024 2025
Nouveautés 2024 202528 Pages
 Interverrouillages
Interverrouillages20 Pages
 PNOZmulti 2
PNOZmulti 28 Pages
 Scanner PSENscan
Scanner PSENscan6 Pages
 Techniques d'automatisation
Techniques d'automatisation28 Pages
 Capteur radar PSEN
Capteur radar PSEN2 Pages
 Formation CMSE
Formation CMSE12 Pages
 Sécurité fonctionnelle
Sécurité fonctionnelle1 Page
 Marquage CE
Marquage CE16 Pages
 Sécurité et cyber sécurité
Sécurité et cyber sécurité8 Pages
 Sécurisation du packaging
Sécurisation du packaging8 Pages
 Avantages myPNOZ
Avantages myPNOZ2 Pages
 Contrôle commande
Contrôle commande192 Pages
 Interverrouillages de sécurité
Interverrouillages de sécurité18 Pages
 Nouveautés
Nouveautés28 Pages
 Sécurisation des AGV/AMR
Sécurisation des AGV/AMR2 Pages
 Burner management
Burner management4 Pages
 PNOZmulti 2 success story
PNOZmulti 2 success story4 Pages
 IAM
IAM10 Pages
 Sécurisation du dépotage
Sécurisation du dépotage2 Pages
 PSEN Radar
PSEN Radar2 Pages
 PSS 4000
PSS 400044 Pages
 MyPNOZ
MyPNOZ8 Pages
 Flyer NR 12
Flyer NR 122 Pages
 Brochure Ingénierie des procédés
Brochure Ingénierie des procédés26 Pages
 Flyer Sécurité sur les rails
Flyer Sécurité sur les rails6 Pages
 Brochure CSME
Brochure CSME12 Pages
 Brochure formations 2019
Brochure formations 201988 Pages
 Prestations de services de Pilz
Prestations de services de Pilz52 Pages
 Industrie 4.0
Industrie 4.02 Pages
 Flyer Packaging
Flyer Packaging6 Pages
 Livre blanc Industrie 4.0
Livre blanc Industrie 4.020 Pages
 Flyer Solutions Robotique
Flyer Solutions Robotique2 Pages
 PSSu H F PN o 312042
PSSu H F PN o 3120424 Pages







- Connecteur électrique
- Codeur industrielle
- Imageur visible
- Connecteur d'alimentation électrique
- Commutateur Ethernet industrielle
- Actionneur industrielle
- Codeur rotatif
- Logiciel d'automatisation
- Actionneur linéaire
- Commutateur Ethernet industriel
- Actionneur électrique
- E/S numérique PILZ
- Imageur de surveillance
- Caméra vidéo couleur
- Machine de mesure
- Module E/S PILZ
- Interrupteur unipolaire PILZ
- Codeur incrémental
- Bouton poussoir
- Connecteur électrique femelle