- Catalogues
- SensoPart Industriesensorik GmbH
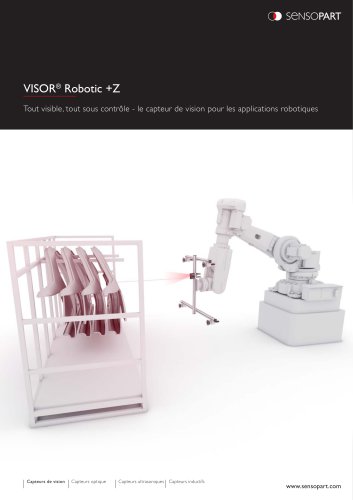
- Méthodes de calibration Le passage des coordonnées de l'image au repère robot
Méthodes de calibration Le passage des coordonnées de l'image au repère robot
1 /8Pages

Méthodes de calibration Le passage des coordonnées de l'image au repère robot
1 /8Pages
Extraits du catalogue

Méthodes de calibration Le passage des coordonnées de l'image au repère robot Capteurs optique Capteurs ultrasoniques Capteurs inductifs
Ouvrir le catalogue en page 1
Méthodes de calibration Le passage des coordonnées de l'image au repère robot L'étalonnage des robots permet de convertir les coordonnées de l'image en coordonnées robot. Par conséquent, toutes les coordonnées (positions et résultats de mesures) sont calculées et éditées dans l'unité sélectionnée. Il existe différentes méthodes d'étalonnage pour les applications dans le domaine de la robotique. Il s'agit notamment des méthodes suivantes: ▪ Plaque de calibration ▪ Tableau de points ▪ Calibration Hand-Eye ▪ Calibration Base-Eye Les étalonnages du robot convertissent d'abord les pixels en unités...
Ouvrir le catalogue en page 2
Objectifs de la calibration - pourquoi la calibration est importante? ▪ Détermination du système de référence : La calibration permet de déterminer la référence entre le système de coordonnées de la caméra et la base du robot (position et orientation). ▪ Conversion du pixel en unité de mesure: La calibration permet de convertir les pixels en une unité de mesure, nécessaire pour déterminer la position exacte des objets dans le champ de vision du capteur de vision. ▪ Correction des distorsions : La calibration permet également de corriger les distorsions causées par l'optique du capteur de vision....
Ouvrir le catalogue en page 3
Plaque de calibration Caméra embarquée ou fixe La méthode: Avec cette méthode de calibration, les positions absolues dans le système de coordonnées du robot sont déterminées à l'aide d'une "plaque de calibration". L'utilisateur peut déterminer la position de la plaque dans l'espace au moyen de cibles et d'une pointe de mesure. Pour ce faire, une ou plusieurs images de la plaque d'étalonnage sont prises et quatre cibles sont repérées. Les valeurs de coordonnées ainsi déterminées sont ensuite introduites dans le logiciel de configuration VISOR®. Ce processus d'apprentissage transforme les coordonnées...
Ouvrir le catalogue en page 4
Tableau de points Caméra fixe La méthode La méthode de calibration "tableaux de points" est une calibration qui ne nécessite pas de plaque de calibration. Des composants réels sont placés dans le champ de vision du VISOR® et les coordonnées des composants dans l'image (px) sont déterminées et associées à une position correspondante dans le système de coordonnées du robot. la calibration peut être calculée à l'aide de plusieurs de ces paires de points. Après la calibration du capteur, la position de la pièce à saisir par le robot est directement disponible dans le système de coordonnées absolues...
Ouvrir le catalogue en page 5
Calibration Hand-Eye Caméra embarquée La méthode La calibration Hand-Eye est une méthode efficace pour calibrer les capteurs montés sur le bras du robot, par exemple lors de la préhension ou du vissage automatisés d'objets. L'un des principaux avantages de cette méthode est que, dans les applications où une caméra est montée sur le bras du robot, cette flexibilité peut être utilisée pour déplacer l'espace de travail dans l'espace de travail du robot. Il en résulte un degré élevé de flexibilité. Pour tirer le meilleur parti de cet avantage, des fonctions spéciales telles que "Trigger Robotic"...
Ouvrir le catalogue en page 6
Calibration Base-Eye Caméra fixe La méthode La calibration Base-Eye de SensoPart est une méthode de calibration particulièrement adaptée aux applications dans lesquelles le capteur de vision est monté dans une position stationnaire - par exemple, lors du positionnement fin de composants dans la pince. Contrairement aux méthodes de calibration classiques, il n'est plus nécessaire d'approcher manuellement des points réels ou de saisir des composants. Pour cartographier le système de coordonnées complet, il suffit de prendre au moins dix images de la plaque de calibration dans différentes positions....
Ouvrir le catalogue en page 7
Nous sommes SensoPart SensoPart est l’un des principaux fabricants de capteurs photoélectriques et de capteurs de vision pour le traitement de l’image pour l’automatisation des usines. Nous proposons également des capteurs inductifs et ultrasoniques, couvrant ainsi un large éventail de tâches d’automatisation industrielle. Nos produits sont utilisés aujourd’hui dans d’innombrables applications et secteurs – de la construction automobile et de l’ingénierie mécanique à l’électronique, l’industrie manufacturière et l’industrie solaire, ainsi que le secteur alimentaire et l’industrie pharmaceutique....
Ouvrir le catalogue en page 8Tous les catalogues et fiches techniques (PDF) SensoPart Industriesensorik GmbH









- Imageur visible
- Module caméra industriel
- Imageur de surveillance
- Caméra vidéo couleur
- Capteur de proximité
- Système de caméra de détection
- Système de caméra de traitement d'images
- Caméra vidéo monochrome
- Capteur de proximité cylindrique
- Capteur de proximité inductif
- Imageur d'inspection
- Détecteur photoélectrique
- Module caméra à grande vitesse
- Détecteur photoélectrique rectangulaire
- Capteur de distance
- Caméra pour la vision industrielle
- Caméra vidéo médicale
- Capteur de proximité analogique
- Capteur de proximité fileté
- Caméra pour l'industrie automobile