Extraits du catalogue

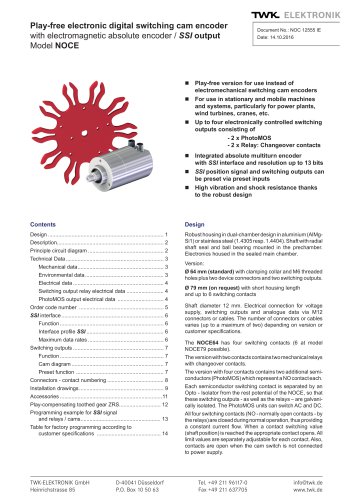
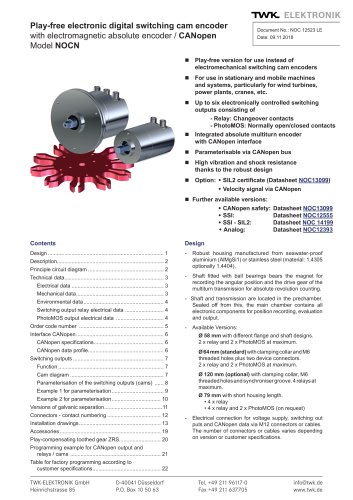
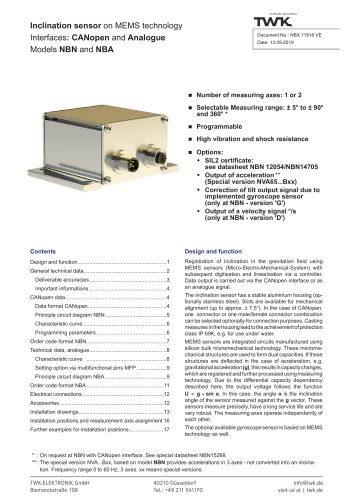
i-TWK. ELEKTRONIK- MAGNOSENS Capteurs linéaires magnétostrictifs Modèles MPK / MSK avec interface EtherCAT ■ Modèle MPK : version profilée ■ Modèle MSK : version tige inox ■ Plages de mesure de 50 à 7600 mm ■ Système robuste et sans contact ■ Résolution jusqu'à 1 pm ■ Jusqu'à 5 mesures de positions simultanées ■ Signal de vitesse ■ Vitesse de transmission jusqu'à 100 MBit/s ■ Paramétrable via le bus ■ Degré de protection jusqu'à IP 67 ■ Température de fonctionnement -40°C ... +75°C ■ Tenue jusqu'à 350 bar de pression pour la version tige inox Descriptif Le capteur linéaire travaille selon le principe d’une mesure de temps entre deux points dans un conducteur magnétostrictif.Un point correspond à l’anneau de positionnement mobile, l’autre au point de référence du capteur. La position est déterminée grâce à la mesure du temps nécessaire à une impulsion, envoyée dans le conducteur magnétostrictif, pour aller d’un point à l’autre. Une électronique de traitement transforme cette information en signal de position digital. Le conducteur magnétostrictif est monté dans un tube en acier inoxydable étanche ou dans un profilé en aluminium. L’électronique de traitement intègre les dernières technologies, avec notamment des composants CMS, et est abritée dans un boîtier en aluminium. Le raccordement électrique se fait sur connecteur. L’anneau de positionnement est constitué de plusieurs aîmants permanents. Pour la version tige inox, il est fixé au mobile par deux vis. Son déplacement se fait sans contact le long de la tige de mesure. Pour la version profilée, il est soit guidé le long du profilé par une liaison mécanique avec la partie mobile de la machine via une rotule. Soit libre de mouvement sans guidage. Plages de mesure standards □ jusqu’à 1000 mm par pas de 50 mm □ jusqu’à 5000 mm par pas de 250 mm (MPK) □ jusqu’à 7600 mm par pas de 250 mm (MSK) Propriétés de l'interface EtherCAT Les capteurs linéaires magnétostrictifs MXK remplissent toutes les exigences d’EtherCAT et peuvent être reliés directement au bus de terrain. Les positions mesurées sont transformées dans le capteur en signaux de sortie compatibles au bus et proportionnels à la distance afin de permettre une transmission instantanée vers la commande. Un logiciel intégré dans le capteur rend possible la transmission des données utiles ainsi que de nombreuses fonctions de surveillance et diagnostic, qui peuvent être configurées lors de l’installation grâce au fichier XML livré avec l’appareil. Le traitement des paramètres et des données de diagnostic s’effectue de la même façon via le télégramme CANopen over EtherCAT que via CANopen. Les caractéristiques les plus importantes du capteur linéaire avec interface EtherCAT sont les suivantes : Signaux de sortie du capteur - 4 Byte données de position - 4 Byte données de vitesse - 2 Byte messages d’état et d’erreur Paramètres configurables - Sens de mesure : croissant / décroissant - Résolution - Extrapolation Adressage du capteur Le réglage manuel de l’adresse et de la vitesse de transmission est supprimé ; dans le maître EtherCAT, seuls les participants au réseau sont choisis et ordonnés selon leur séquence. Fichier XML Le fichier XML permettant d’intégrer le capteur dans le système maître EtherCAT et le manuel d’utilisation au format PDF se trouvent sur le CD-ROM fourni avec l’appareil.
Ouvrir le catalogue en page 1
Contre-connecteur EtherCAT Les LEDs (verte/rouge) sur la tête du capteur servent au réglage et donnent également des informations sur l'état du capteur. ■ Type ■ Boîtier ■ Contacts ■ Raccordement fils ■ Section de raccordement ■ Diamètre du câble ■ Degré de protection conn. M12, codé D, 4 broches zamac, nickelé, droit broches, or borne de connexion max. 0,75 mm2 6 - 8 mm IP 67 Contre-connecteur alimentation Schéma de principe ■ Type ■ Boîtier ■ Contacts ■ Raccordement fils ■ Section de raccordement ■ Diamètre du câble conn. M8, codé A, 4 broches PVC, droit CuZn, CuSn vis max. 0,5 mm2 max. 5...
Ouvrir le catalogue en page 2
Numéros d'articles ■ Capteur linéaire MPK 1 / 1000 S 001 - 1 M 01 Variantes électriques et mécaniques* M = version conn. M8 / M12 Nombre d'aimants : 1 - 5 Résolution = 1 |jm (réglable via EtherCAT) Evolution du signal S = croissant pour un déplacement de l'anneau du filetage vers l'extrémité de la tige (réglable via EtherCAT) Plage de mesure en mm Version ■ Nous recommandons : Kabel-XXX-114 : Câble Industrial Ethernet équipé des deux côtés de connecteurs M12 surmoulés, codés D (XXX = longueur en mètres) Longueurs standards: 1, 2, 3 et 5 m ■ Kabel-XXX-118: Câble Ethernet équipé d'un...
Ouvrir le catalogue en page 3
Capteurs linéaires magnétostrictifs MPK / MSK Dimensions en mm Modèle MSK (version tige) Connecteur métallique Utiliser de préférence des matériaux amagnétiques pour réaliser la fixation du capteur (par ex. : laiton, plastique). Si des matériaux ferromagnétiques sont employés, veuillez vous reporter à la fiche technique MWA10318. Vertical: 18° Horizontal: 360 ° Profil de mesure Plage de mesure actif 25-5000 Plage de mesure / commandé (mm) Anneau de positionnement sans guidage PR03 Connecteur métallique Plage de mesure actif 50-5000 Connecteur métallique Rotule en point milieu Pour les...
Ouvrir le catalogue en page 4Tous les catalogues et fiches techniques (PDF) TWK-ELEKTRONIK GmbH
-
 Codeur TBD
Codeur TBD12 Pages
-
 Codeur KRP
Codeur KRP7 Pages
-
 Apercu de programme 2022
Apercu de programme 202264 Pages
-
 Brochure image TWK
Brochure image TWK28 Pages
-
 Codeur TBA42
Codeur TBA426 Pages
-
 Codeur TRA42
Codeur TRA426 Pages
-
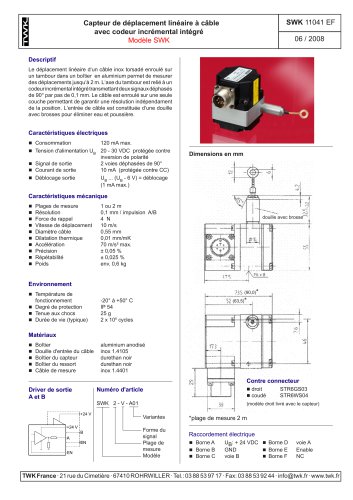 Capteurs à câble SWK
Capteurs à câble SWK1 Pages
-
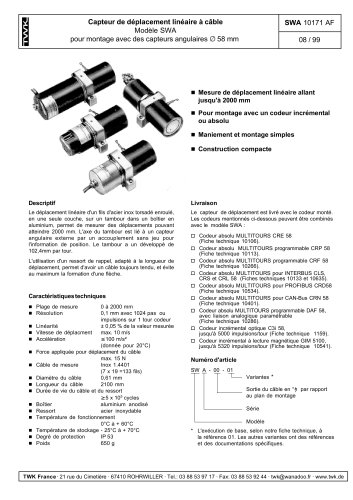 Capteurs à câble SWA
Capteurs à câble SWA2 Pages
-
 Capteurs à câble SWP
Capteurs à câble SWP3 Pages
-
 Capteurs à câble SWL
Capteurs à câble SWL2 Pages
-
 Capteurs à câble SWH
Capteurs à câble SWH1 Pages
-
 Codeur TRT
Codeur TRT14 Pages
-
 Capteurs à câble SWF
Capteurs à câble SWF4 Pages
-
 Codeur incrémental TBI42
Codeur incrémental TBI426 Pages
-
 Capteurs à câble SWM
Capteurs à câble SWM2 Pages
-
 Codeur TRT/S3 SIL2
Codeur TRT/S3 SIL213 Pages
-
 Capteur rotatif VP12
Capteur rotatif VP121 Pages
-
 Capteurs à câble SWG
Capteurs à câble SWG5 Pages
-
 Codeur TBE50
Codeur TBE5016 Pages
-
 Codeur TRK
Codeur TRK11 Pages
-
 Codeur TMN50 manuel
Codeur TMN50 manuel22 Pages
-
 Codeur TMN50
Codeur TMN506 Pages
-
 Codeur TRE42
Codeur TRE426 Pages
-
 Codeur TRE50
Codeur TRE507 Pages
-
 Codeur TRA50
Codeur TRA507 Pages
-
 Codeur TBE42
Codeur TBE426 Pages
-
 Codeur TRD
Codeur TRD12 Pages
-
 Codeur TME50
Codeur TME506 Pages
-
 Codeur TBN36
Codeur TBN366 Pages
-
 Codeur TMA50
Codeur TMA506 Pages
-
 Codeur TMN42 manuel
Codeur TMN42 manuel22 Pages
-
 Codeur TBA50
Codeur TBA5016 Pages
-
 Codeur TBE36 manuel
Codeur TBE36 manuel22 Pages
-
 Codeur TBE36
Codeur TBE366 Pages
-
 Codeur TBN42
Codeur TBN426 Pages
-
 Codeur TBB50
Codeur TBB5016 Pages
-
 Codeur PBA12
Codeur PBA122 Pages
-
 Codeur TBA36
Codeur TBA366 Pages
-
 Codeur PP27
Codeur PP273 Pages
-
 Codeur TKA60
Codeur TKA602 Pages
-
 Codeur TKN46
Codeur TKN467 Pages
-
 Rotary encoder TBN58/C3 manual
Rotary encoder TBN58/C3 manual50 Pages
-
 Rotary encoder TBN58/C3
Rotary encoder TBN58/C322 Pages
-
 Rotary encoder TBD Manual
Rotary encoder TBD Manual26 Pages
-
 Rotary encoder TBE58
Rotary encoder TBE5816 Pages
-
 Rotary encoder KRP - Manual
Rotary encoder KRP - Manual19 Pages
-
 Rotary encoder TBN58/S4 SIL2
Rotary encoder TBN58/S4 SIL222 Pages
-
 Rotary encoder TBN50/C3 manual
Rotary encoder TBN50/C3 manual20 Pages
-
 Rotary encoder TBN50/C3
Rotary encoder TBN50/C322 Pages
-
 Rotary encoder HBN/S3 SIL2
Rotary encoder HBN/S3 SIL216 Pages
-
 Inclinometer NBA51
Inclinometer NBA516 Pages
-
 Incremental encoder FOI
Incremental encoder FOI7 Pages
-
 Rotary encoder TRN58/S4 SIL2
Rotary encoder TRN58/S4 SIL222 Pages
-
 Rotary encoder TRN58/C3 manual
Rotary encoder TRN58/C3 manual50 Pages
-
 Rotary encoder TRN58/C3
Rotary encoder TRN58/C322 Pages
-
 Rotary encoder TRN42/S4 SIL2
Rotary encoder TRN42/S4 SIL222 Pages
-
 Manual TRN50/C3
Manual TRN50/C386 Pages
-
 Rotary encoder TRN50/C3
Rotary encoder TRN50/C322 Pages
-
 Rotary encoder TRN42/C3 manual
Rotary encoder TRN42/C3 manual86 Pages
-
 Rotary encoder TRN42/C3
Rotary encoder TRN42/C322 Pages
-
 Rotary encoder TBN42/S4 SIL2
Rotary encoder TBN42/S4 SIL222 Pages
-
 Rotary encoder TBN42/C3 manual
Rotary encoder TBN42/C3 manual86 Pages
-
 Rotary encoder TBN42/C3
Rotary encoder TBN42/C322 Pages
-
 Rotary encoder TRE58
Rotary encoder TRE5816 Pages
-
 Rotary encoder TRT manual
Rotary encoder TRT manual40 Pages
-
 Switching cam encoder NOCE
Switching cam encoder NOCE14 Pages
-
 Switching cam encoder NOCA
Switching cam encoder NOCA17 Pages
-
 Vibration sensor NVT/S3 PLd
Vibration sensor NVT/S3 PLd12 Pages
-
 Vibration sensor NVA
Vibration sensor NVA12 Pages
-
 Inclinometer NBN
Inclinometer NBN17 Pages
-
 Vibration sensor NVA/S3 PLd
Vibration sensor NVA/S3 PLd15 Pages
-
 Switching cam encoder NOCN
Switching cam encoder NOCN22 Pages
-
 Inclination sensor NBT manual
Inclination sensor NBT manual21 Pages
-
 Inclination sensor NBT
Inclination sensor NBT10 Pages
-
 Inclinometer NBA
Inclinometer NBA17 Pages
-
 Inclinometer NBT/S3 SIL2/PLd
Inclinometer NBT/S3 SIL2/PLd12 Pages
-
 Inclinometer NBN/S3 SIL2
Inclinometer NBN/S3 SIL213 Pages
-
 Rotary encoder HBE
Rotary encoder HBE14 Pages
-
 Rotary encoder TRK manual
Rotary encoder TRK manual18 Pages
-
 Rotary encoder TRK/S3 SIL2
Rotary encoder TRK/S3 SIL214 Pages
-
 Rotary encoder TME42
Rotary encoder TME426 Pages
-
 Rotary encoder TRD manual
Rotary encoder TRD manual26 Pages
-
 Rotary encoder TMN42 manual
Rotary encoder TMN42 manual22 Pages
-
 Rotary encoder TMA42
Rotary encoder TMA426 Pages
-
 Rotary encoder TBN37
Rotary encoder TBN378 Pages
-
 Rotary encoder TBA37
Rotary encoder TBA377 Pages
-
 Rotary encoder TKN46 manual
Rotary encoder TKN46 manual22 Pages