- Catalogues
- TWK-ELEKTRONIK GmbH
- Codeur TRK
Codeur TRK
1 /11Pages

Codeur TRK
1 /11Pages
Extraits du catalogue

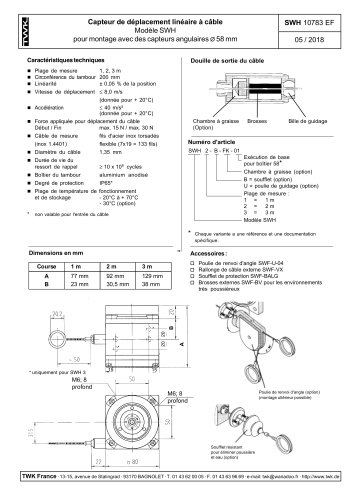
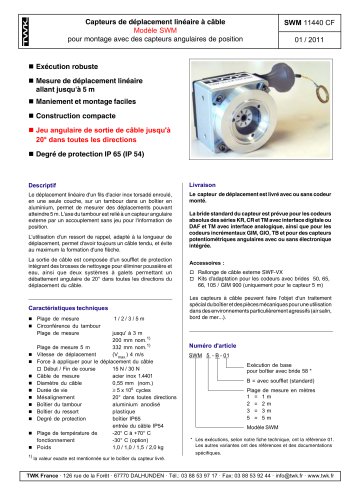
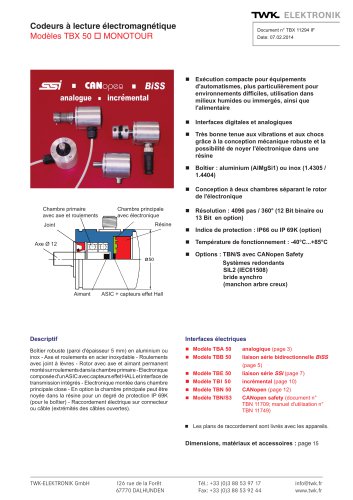
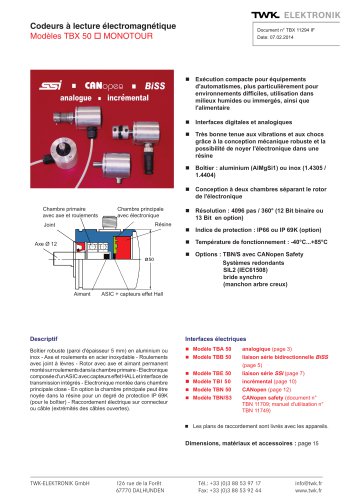
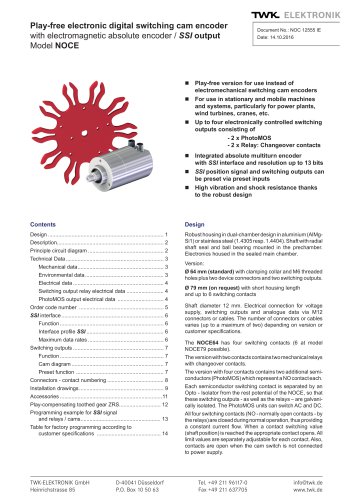
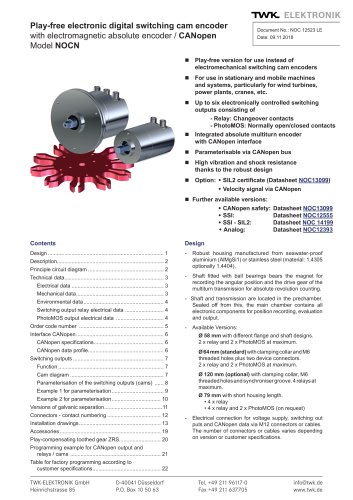
■ Système de mesure sans contact et sans usure par effet Hall ■ Très bonne tenue aux vibrations et aux chocs grâce à une conception mécanique robuste ■ Résolution : 4096 pas / 360° < - 12 Bit (13 Bit en option) ■ Plage de mesure: 4096 tours (12 Bit) ■ Conception à deux chambres séparant le rotor de l'électronique ■ Indice de protection: jusqu'à IP69K ■ Option: capteur de déplacement linéaire à câble avec codeur intégré: TRK125-D Descriptif et fonctionnement Saisie de la position angulaire et des tours grâce à des capteurs Hall - Multitours absolu à démultiplication mécanique allant jusqu'à 4096 tours - Transmission des données, paramétrage et diagnostic effectués grâce à EtherCAT. Boîtier robuste (épaisseur paroi 5 mm) en aluminium (AlMgSi1) résistant à l'eau de mer ou en inox - Arbre en acier inoxydable - Roulement avec joint à lèvres - Electronique composée d'un ASIC avec capteurs effet HALL - Raccordement électrique par connecteur M12 ou par câble. Les codeurs angulaires TRK sont pourvus de l'interface EtherCAT selon IEC 61158-2 à 6 et selon Encoder-Profil CiA DSP406. En tant que "Full Slave", le TRK supporte toutes les formes d'adressage d'EtherCAT, telles que logical addressing, position addressing et node addressing. Le traitement des paramètres et des données de diagnostic s'effectue via CANopen over EtherCAT-Telegramms et CA-Nopen Encoder Profil. Paramètres et données de diaganostic se trouvent dans un tableau d'objets sous les mêmes indices que sous CANopen. Les données de process sont transmises par des PDO's dont la composition est déterminée par le PDO-Mapping. Caractéristiques EtherCAT® ■ Complex-Slave avec CANopen over EtherCAT (CoE) ■ „Full Slave" - toutes les formes d'adressage excepté Segment Addressing ■ Tous les services EtherCAT Write/Read ■ Fieldbus Memory Management Unit (FMMU) ■ Sync-Manager ■ Distributed Clocks (sur demande) EtherCAT® est une marque déposée et une technologie brevetée sous licence de Beckhoff Automation GmbH, Allemagne.
Ouvrir le catalogue en page 1
Signaux d'entrée 1■ 4 Byte données de position ■ 2 Byte données de vitesse (sur demande) Signaux de sortie 1 ■ 2 Byte mot de contrôle Caractéristiques électriques ■ Système de lecture ■ Tension d'alimentation ■ Puissance absorbée ■ Résolution ■ Plage de mesure ■ Résolution totale ■ Précision totale ■ Code de transmission ■ Evolution du code ■ Taux de rafraîchissement interne ASIC avec éléments Hall + 9 VDC à + 36 VDC < 3 W, courant de démarrage < 500 mA 4096 pas / 360°< - (12 Bit) (13 Bit en option) 4096 tours 24 bit (option 25 bit) ± 0,2 % (pour un tour) binaire CW / CCW < 2 ms Caractéristiques...
Ouvrir le catalogue en page 2
Sortie câble alimentation (en option) ■ Type ■ Gaine ■ Plage de température ■ Diamètre extérieur ■ Rayon de courbure min. 2 x 0,75 mm2, blindé PUR, couleur: grise de - 40 °C à + 80 °C pour installation fixe, de - 5 °C + 70 °C pour installation mobile 6 mm 6 x d pour installation fixe, 15 x d pour installation mobile Paramètres programmables Paramètres (Les valeurs entre parenthèses sont valables pour le TRKxx-xx8192R4096C1MKxx) Date : 13.06.2018 Page 3 de 11 Document
Ouvrir le catalogue en page 3
Schéma de principe Magnet Singletour Raccordement électrique EtherCAT connecteur M12 (Portl et Port 2) * Couleurs du câble préconfectionné Industrial Ethernet selon ISO / IEC 8802-3. Raccordement alimentation connecteur M12 PIN Date : 13.06.2018 Page 4 de 11 Document n° TRK 12825 IF
Ouvrir le catalogue en page 4
Date : 13.06.2018 Page 5 de 11 Document n° TRK 12825 IF
Ouvrir le catalogue en page 5
Numéro d'article version standard Variantes électriques et/ou mécaniques 01 Standard 02 Indice de protection IP69K K Interface EtherCAT Raccordement électrique : M Connecteur Kx Câble, x = longueur en m Profil : C1 Standard EtherCAT Plage de mesure : 4096 tours 10 Longueur en mètres pour la version capteur à câble. Valeurs possibles: 6,10 Code de sortie : R Binaire 4096 Résolution : 8192 Pas / 360° < ou pas / circonférence du tambour (248,03) pour version capteur à câble Matériau boîtier : A Aluminium S Inox 1.4305 V Inox 1.4404 Type de bride : K Bride de serrage, arbre 10 mm avec méplat KF Bride...
Ouvrir le catalogue en page 6
Accessoires (à commander séparément) ■ Contre-connecteur droit STK4GP81 pour EtherCAT In/Out, voir document STK14570 STK4GP110 pour EtherCAT In/Out (Inox 1.4404), voir document STK14569 STK4GS60 pour la tension d'alimentation, voir document STK14572 STK4GS104 pour la tension d'alimentation (Inox 1.4404), voir document STK14571 ■ Contre-connecteur coudé (utilisable uniquement pour connecteurs à position prédéfinie (option)) STK4WP82 pour EtherCAT In/Out voir document STK14676 STK4WS61 pour la tension d'alimentation voir document STK14675 ■ Câble de liaison KABEL-xxx-114 Câble Industrial Ethernet...
Ouvrir le catalogue en page 7
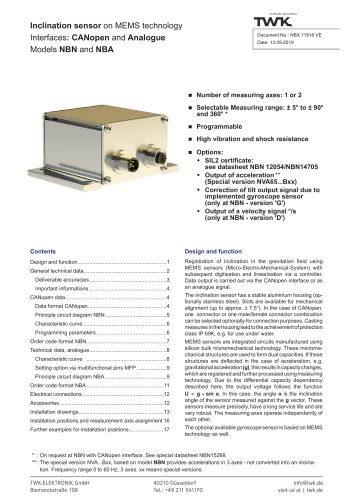
Codeur absolu multitours modèle TRK Dimensions en mm Modèle standard Modèle 58 avec bride de serrage, numéro d'article : TRK58-KA 4096 R 4096 C1 M K01 Axe ø 10 mm * Version monotour plus courte de 14 mm n En option: arbre "P" avec rainure et clavette parallèle Vue sur les connecteurs M12 Connecteur M12 4-pôles, mâle, codé A alignè Connecteur M12 4-pôles, femelle, codé D alignè Rainure pour clavette DIN 6885-A 3x3x10 Position détrompage Vue arrière avec connecteur M12 Vue arrière avec sortie câble LEDs de diagnostic LED-Statusanzeigen (voir tableau page 5)
Ouvrir le catalogue en page 8Tous les catalogues et fiches techniques (PDF) TWK-ELEKTRONIK GmbH
 Codeur TBD
Codeur TBD12 Pages
 Codeur KRP
Codeur KRP7 Pages
 Apercu de programme 2022
Apercu de programme 202264 Pages
 Brochure image TWK
Brochure image TWK28 Pages
 Codeur TBA42
Codeur TBA426 Pages
 Codeur TRA42
Codeur TRA426 Pages
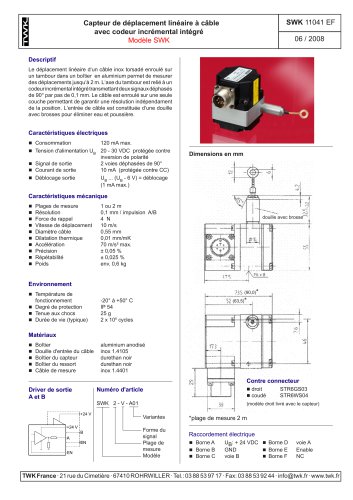 Capteurs à câble SWK
Capteurs à câble SWK1 Page
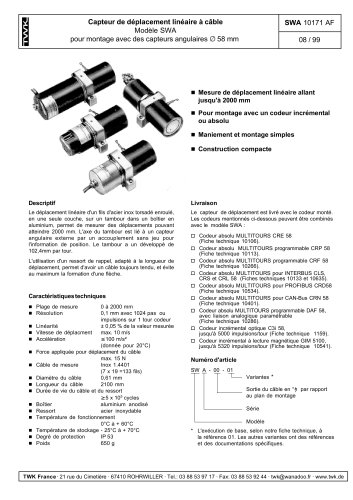 Capteurs à câble SWA
Capteurs à câble SWA2 Pages
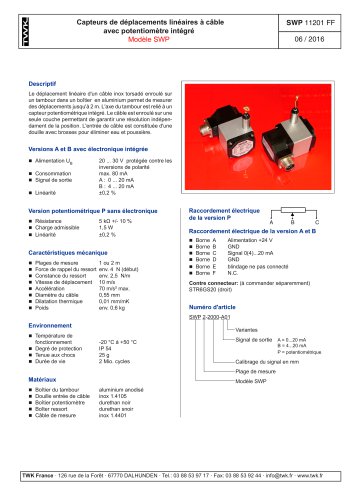 Capteurs à câble SWP
Capteurs à câble SWP3 Pages
 Capteurs à câble SWL
Capteurs à câble SWL2 Pages
 Capteurs à câble SWH
Capteurs à câble SWH1 Page
 Codeur TRT
Codeur TRT14 Pages
 Capteurs à câble SWF
Capteurs à câble SWF4 Pages
 Codeur incrémental TBI42
Codeur incrémental TBI426 Pages
 Capteurs à câble SWM
Capteurs à câble SWM2 Pages
 Codeur TRT/S3 SIL2
Codeur TRT/S3 SIL213 Pages
 Capteur rotatif VP12
Capteur rotatif VP121 Page
 Capteurs à câble SWG
Capteurs à câble SWG5 Pages
 Codeur TBE50
Codeur TBE5016 Pages
 Codeur TMN50 manuel
Codeur TMN50 manuel22 Pages
 Codeur TMN50
Codeur TMN506 Pages
 Codeur TRE42
Codeur TRE426 Pages
 Codeur TRE50
Codeur TRE507 Pages
 Codeur TRA50
Codeur TRA507 Pages
 Codeur TBE42
Codeur TBE426 Pages
 Codeur TRD
Codeur TRD12 Pages
 Codeur TME50
Codeur TME506 Pages
 Codeur TBN36
Codeur TBN366 Pages
 Codeur TMA50
Codeur TMA506 Pages
 Codeur TMN42 manuel
Codeur TMN42 manuel22 Pages
 Codeur TBA50
Codeur TBA5016 Pages
 Codeur TBE36 manuel
Codeur TBE36 manuel22 Pages
 Codeur TBE36
Codeur TBE366 Pages
 Codeur TBN42
Codeur TBN426 Pages
 Codeur TBB50
Codeur TBB5016 Pages
 Codeur PBA12
Codeur PBA122 Pages
 Codeur TBA36
Codeur TBA366 Pages
 Codeur PP27
Codeur PP273 Pages
 Codeur TKA60
Codeur TKA602 Pages
 Codeur TKN46
Codeur TKN467 Pages
 Rotary encoder TBN58/C3 manual
Rotary encoder TBN58/C3 manual50 Pages
 Rotary encoder TBN58/C3
Rotary encoder TBN58/C322 Pages
 Rotary encoder TBD Manual
Rotary encoder TBD Manual26 Pages
 Rotary encoder TBE58
Rotary encoder TBE5816 Pages
 Rotary encoder KRP - Manual
Rotary encoder KRP - Manual19 Pages
 Rotary encoder TBN58/S4 SIL2
Rotary encoder TBN58/S4 SIL222 Pages
 Rotary encoder TBN50/C3 manual
Rotary encoder TBN50/C3 manual20 Pages
 Rotary encoder TBN50/C3
Rotary encoder TBN50/C322 Pages
 Rotary encoder HBN/S3 SIL2
Rotary encoder HBN/S3 SIL216 Pages
 Inclinometer NBA51
Inclinometer NBA516 Pages
 Incremental encoder FOI
Incremental encoder FOI7 Pages
 Rotary encoder TRN58/S4 SIL2
Rotary encoder TRN58/S4 SIL222 Pages
 Rotary encoder TRN58/C3 manual
Rotary encoder TRN58/C3 manual50 Pages
 Rotary encoder TRN58/C3
Rotary encoder TRN58/C322 Pages
 Rotary encoder TRN42/S4 SIL2
Rotary encoder TRN42/S4 SIL222 Pages
 Manual TRN50/C3
Manual TRN50/C386 Pages
 Rotary encoder TRN50/C3
Rotary encoder TRN50/C322 Pages
 Rotary encoder TRN42/C3 manual
Rotary encoder TRN42/C3 manual86 Pages
 Rotary encoder TRN42/C3
Rotary encoder TRN42/C322 Pages
 Rotary encoder TBN42/S4 SIL2
Rotary encoder TBN42/S4 SIL222 Pages
 Rotary encoder TBN42/C3 manual
Rotary encoder TBN42/C3 manual86 Pages
 Rotary encoder TBN42/C3
Rotary encoder TBN42/C322 Pages
 Rotary encoder TRE58
Rotary encoder TRE5816 Pages
 Rotary encoder TRT manual
Rotary encoder TRT manual40 Pages
 Switching cam encoder NOCE
Switching cam encoder NOCE14 Pages
 Switching cam encoder NOCA
Switching cam encoder NOCA17 Pages
 Vibration sensor NVT/S3 PLd
Vibration sensor NVT/S3 PLd12 Pages
 Vibration sensor NVA
Vibration sensor NVA12 Pages
 Inclinometer NBN
Inclinometer NBN17 Pages
 Vibration sensor NVA/S3 PLd
Vibration sensor NVA/S3 PLd15 Pages
 Switching cam encoder NOCN
Switching cam encoder NOCN22 Pages
 Inclination sensor NBT manual
Inclination sensor NBT manual21 Pages
 Inclination sensor NBT
Inclination sensor NBT10 Pages
 Inclinometer NBA
Inclinometer NBA17 Pages
 Inclinometer NBT/S3 SIL2/PLd
Inclinometer NBT/S3 SIL2/PLd12 Pages
 Inclinometer NBN/S3 SIL2
Inclinometer NBN/S3 SIL213 Pages
 Rotary encoder HBE
Rotary encoder HBE14 Pages
 Rotary encoder TRK manual
Rotary encoder TRK manual18 Pages
 Rotary encoder TRK/S3 SIL2
Rotary encoder TRK/S3 SIL214 Pages
 Rotary encoder TME42
Rotary encoder TME426 Pages
 Rotary encoder TRD manual
Rotary encoder TRD manual26 Pages
 Rotary encoder TMN42 manual
Rotary encoder TMN42 manual22 Pages
 Rotary encoder TMA42
Rotary encoder TMA426 Pages
 Rotary encoder TBN37
Rotary encoder TBN378 Pages
 Rotary encoder TBA37
Rotary encoder TBA377 Pages
 Rotary encoder TKN46 manual
Rotary encoder TKN46 manual22 Pages





































- Codeur rotatif
- Codeur incrémental
- Codeur rotatif incrémental
- Codeur rotatif absolu
- Tiltmètre
- Codeur rotatif magnétique
- Codeur rotatif pour l'industrie
- Système de capteur de déplacement
- Capteur de déplacement linéaire
- Inclinomètre numérique
- Codeur rotatif en aluminium
- Codeur rotatif en acier inoxydable
- Codeur rotatif monotour
- Tiltmètre MEMS
- Codeur rotatif à bride
- Inclinomètre multiaxe
- Codeur rotatif ultra robuste
- Codeur angulaire SSI
- Codeur rotatif multitour