
Extraits du catalogue

Données techniques Spécification Charge utile Interface utilisateur graphique Polyscope sur écran tactile 12 pouces Performances Consommation maximale en utilisation standard Consommation moyenne en utilisation standard Plage de température ambiante Ports E/S Entrées numérique Sorties numérique Entrées analogique Sorties analogique Entrées numériques 500 Hz Fréquence de contrôle Modbus TCP PROFINET Ethernet/IP USB 2.0, USB 3.0 Source d’alimentation Capteur F/T Plage Résolution Précision Mouvement Répétabilité de position selon ISO 9283 Mouvement de l’axe du bras robotisé Base Épaule Coude Poignet 1 Poignet 2 Poignet 3 Classe ISO Salle blanche Dans toutes les directions Ports E/S sur l’outil Entrées numérique Sorties numérique Entrées analogique 2 A (Double broche) 1 A (Simple broche) Aluminium, Plastique, Acier Type de connecteur d’outil (effecteur) Longueur du câble du bras robotisé Taille du boîtier de commande (LxHxP) Acier revêtu de poudre Pendentif d’apprentissage Caractéristiques Classification IP Caractéristiques physiques Poids avec câble UPDATE 10/09/2019 FR Caractéristiques physiques Poids avec 1 m de câble TP
Ouvrir le catalogue en page 1Tous les catalogues et fiches techniques (PDF) Universal Robots France
-
 UR5e Fiche descriptive
UR5e Fiche descriptive1 Pages
-
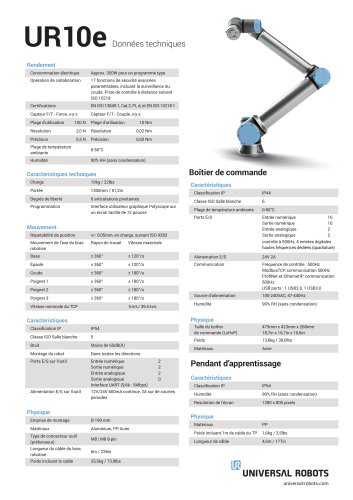 UR10e Fiche descriptive
UR10e Fiche descriptive1 Pages
-
 UR3e Fiche descriptive
UR3e Fiche descriptive1 Pages
